1. עקרונות מבניים שונים
עקרונות העיצוב של שני הדגמים שונים, וכתוצאה מכך מבנים שונים להבטחת סנכרון משני צידי המחוון הכיפוף. מכונת כיפוף ציר הפיתול משתמשת בציר פיתול כדי לחבר את מוטות הנדנדה השמאלי והימני ליצירת ציר פיתול המאלץ מנגנון סנכרון לנוע מעלה ומטה על הצילינדרים משני הצדדים, כך שמכונת כיפוף סינכרון ציר הפיתול היא שיטת סינכרון מאולצת מכנית , ואת ההקבלה של המחוון לא ניתן לבדוק אוטומטית תיווך אוטומטי.
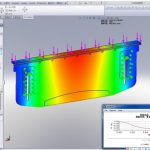
מכונת הכיפוף הסינכרונית האלקטרו-הידראולית אמורה להתקין קנה מידה מגנטי (אופטי) על המחוון ועל לוחית הקיר. מערכת הבקרה המספרית יכולה לנתח את הסנכרון של שני הצדדים של המחוון באמצעות מידע המשוב של הסולם המגנטי (אופטי) בכל עת. אם יש שגיאה, מערכת הבקרה המספרית תתכוונן דרך שסתום הסרוו האלקטרו-הידראולי הפרופורציונלי כדי לסנכרן את המהלך משני צידי המחוון. מערכת בקרה מספרית, קבוצת שסתומי בקרה הידראולית וקנה מידה מגנטי מהווים את בקרת המשוב במעגל סגור של מכונת הכיפוף הסינכרונית האלקטרו-הידראולית.

2. דיוק
ההקבלה של המחוון קובעת את הזווית של חומר העבודה. מכונת הכיפוף הסינכרוני של ציר הפיתול שומרת מכנית על הסנכרון של המחוון, ללא משוב שגיאה בזמן אמת, והמכונה עצמה אינה יכולה לבצע התאמות אוטומטיות. בנוסף, כושר העומס החלקי שלו גרוע (מכונת הכיפוף הסינכרוני בציר הפיתול משתמשת בציר הפיתול כדי לאלץ את מנגנון הסנכרון להזיז את הצילינדרים משני הצדדים למעלה ולמטה. אם העומס החלקי לטווח ארוך יגרום לעיוות של ציר הפיתול .), מכונת כיפוף סינכרוני אלקטרו הידראולי היא מערכת באמצעות חשמל פרופורציונלי. קבוצת שסתומי הנוזל שולטת בסנכרון המחוון, והסקאלה המגנטית (אופטית) מספקת משוב שגיאה בזמן אמת. אם יש שגיאה, המערכת תתאים דרך השסתום הפרופורציונלי כדי לשמור על הסנכרון של המחוון.
3. מהירות
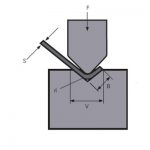
ישנן שתי נקודות בעבודת המכונה שקובעות את מהירות הריצה שלה: (1) מהירות המחוון, (2) מהירות המדידה האחורית, (3) צעד כיפוף.
מכונת הכיפוף הסינכרוני בציר הפיתול משתמשת בצילינדר של 6:1 או 8:1, שהוא איטי, בעוד שמכונת הכיפוף הסינכרונית האלקטרו-הידראולית משתמשת בצילינדר של 13:1 או 15:1, שהוא מהיר. לכן, מהירות הירידה המהירה ומהירות החזרה של מכונת הכיפוף הסינכרונית האלקטרו-הידרולית גבוהות בהרבה ממכונת הכיפוף הסינכרוני הפיתול.
כאשר המחוון של מכונת הכיפוף הסינכרוני בציר הפיתול זז כלפי מטה, למרות שלמהירות יש את הפונקציות של ירידה והאטה מהירים, מהירויות הירידה והחזרה המהירה הן רק 80 מ"מ לשנייה, והמעבר המהיר והאיטי אינו חלק. מהירות הריצה של המד האחורי היא רק 100 מ"מ לשנייה.
אם יש צורך לכופף את חומר העבודה במספר שלבים, יש להגדיר בנפרד כל תהליך של מכונת הכיפוף הסינכרונית של ציר הפיתול, ותהליך העיבוד מסורבל מאוד. עם זאת, המכונה הסינכרונית האלקטרו-הידראולית יכולה להגדיר ולשמור את התהליך של כל שלב דרך המחשב, וניתנת להפעלה רציפה, מה שמשפר מאוד את מהירות שלב הכיפוף ומשפר את יעילות העבודה.
כאשר המחוון של מכונת הכיפוף הסינכרונית האלקטרו-הידראולית יורד, למהירות יש את הפונקציות של מהיר והאטה. מהירות הירידה והחזרה המהירה יכולה להגיע ל-200 מ"מ לשנייה, וההמרה המהירה והאיטית היא חלקה, מה שיכול לשפר מאוד את יעילות הייצור. במקביל, מהירות הריצה של המד האחורי מגיעה ל-300 מ"מ לשנייה.
4. כוח
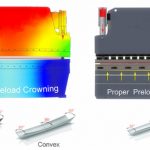
בגלל העיצוב שלה, מכונת הכיפוף הסינכרונית בפיתול אינה יכולה להתכופף תחת עומס אקסצנטרי. אם הוא מכופף תחת עומס אקסצנטרי במשך זמן רב, זה יגרום לעיוות של פיר הפיתול. למכונת כיפוף CNC סינכרונית אלקטרו הידראולית אין בעיה כזו. צירי Y1 ו-Y2 בצד שמאל וימין פועלים באופן עצמאי, כך שניתן לכופף אותו בעומס חלקי. יעילות העבודה של מכונת כיפוף סינכרונית אלקטרו-הידראולית יכולה להיות שווה ערך לשניים עד שלושה מכונות כיפוף סינכרוני בצירי פיתול.
מוצרים קשורים
 עקרון העבודה והרכבה של מכונת כיפוף בלמים CNC ללחיצה
עקרון העבודה והרכבה של מכונת כיפוף בלמים CNC ללחיצה- למה להוסיף מערכת פיצוי למכונת כיפוף בלם לחץ
- השוואה ובחירה של מערכות CNC בלם לחץ
- 4 שלבים להכיר את מערכת E21 של מכופף מתכת CNC
- כיצד לבצע פיצוי סטיה עבור מכופף מתכת CNC
- הנמכר ביותר בלחץ הידראולי לחץ הידראולי בסדנה לחץ הידראולי בטון הידראולי
- בלם לחץ סין 40 טון
- כללי פעולה בטוחים של מכונת עיתונות כוח הידראולית
- WILA פתרון יעיל לכיפוף לוחות בינוניים ועבים
- תקלות מכניות נפוצות ותחזוקה של מכונות כיפוף בלם לחץ